Маленькие и быстроходные модели требуют более низкой чувствительности, большие и медленные модели требуют более высокой чувствительности.
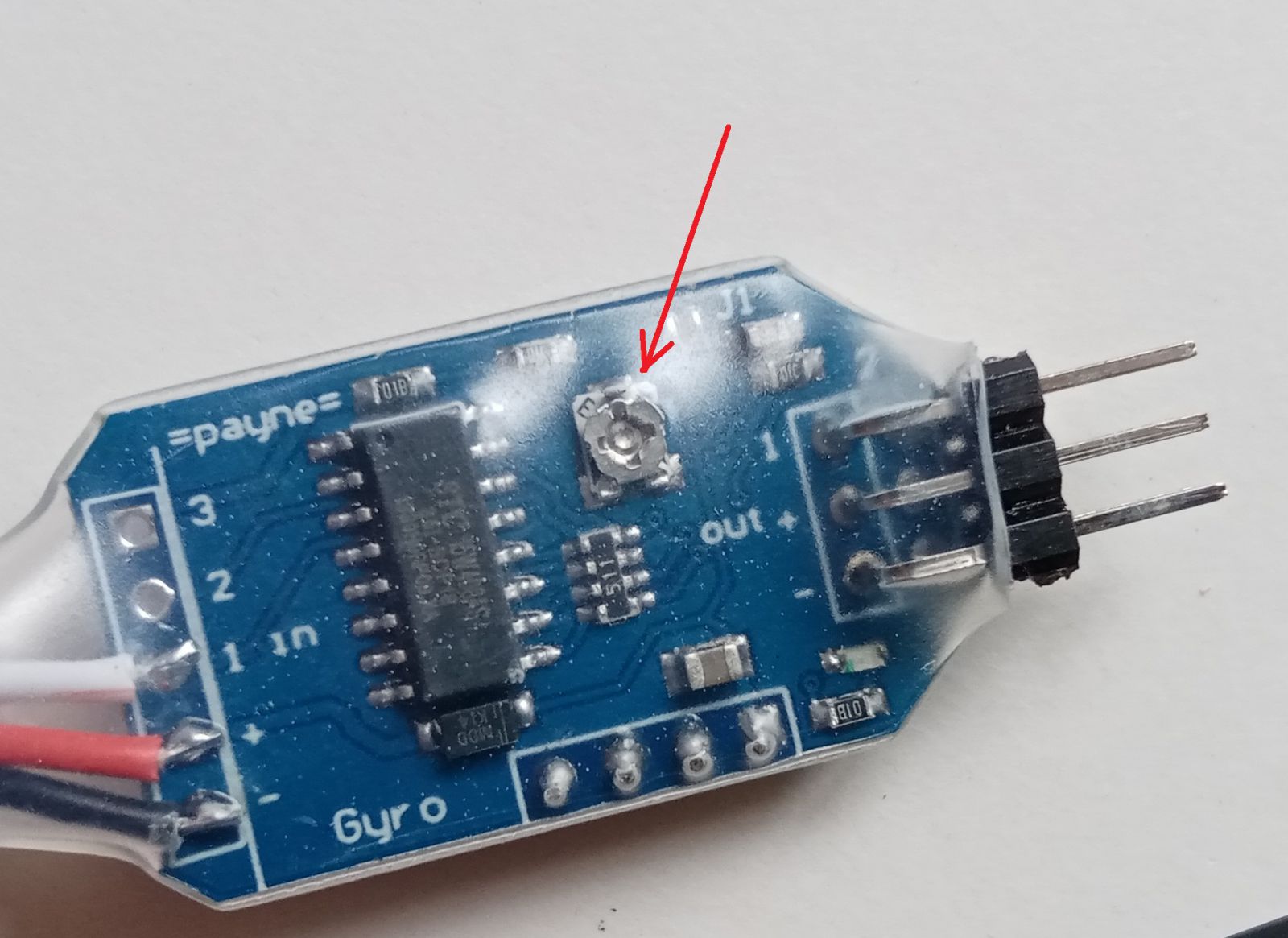
Если потенциометр повернут полностью влево (против часовой стрелки), чувствительность равна «0», что означает, что регулятор выключен и, следовательно, не активирован. Изначально регулятор настроен на стандартную чувствительность, которая хорошо работает с большинством моделей. Идеальная настройка может быть достигнуто путем индивидуальной корректировки потенциометра. Чем выше чувствительность (то есть, чем больше потенциометр поворачивается направо) тем точнее настройка. Тем не менее, это может увеличить возможность «дельфиноподобного» поведения , модель рыскает вверх и вниз. Оптимальная чувствительность достигается таким образом, регулировка находится чуть ниже точки в которой модель начинает качаться.
Контроллер снабжен фишкой разъёма Futaba . Маркировка проводов соответствуют следующим образом:
белый - сигнал
красный - плюс
черный – минус
Важно!
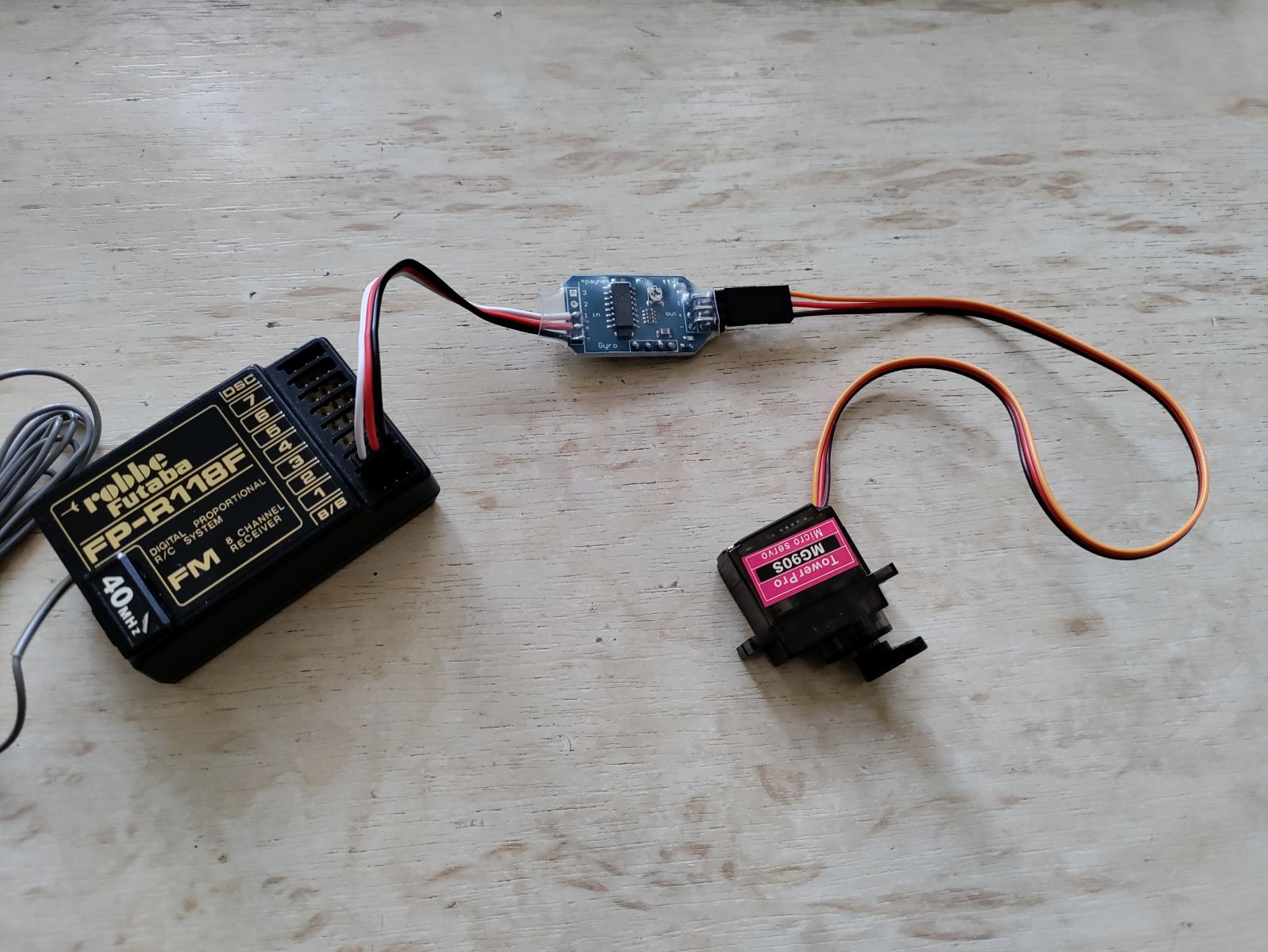
Рули глубины должны работать против наклона модели. Если нет, контроллер должен быть повернут на 180 °.
Контроллер изменяет угол отклонения сервопривода пропорционально углу своего наклона. Устройство определяет изменение угла наклона лодки и пропорционально перемещает кормовые рули глубины, чтобы скорректировать угол наклона модели обратно на нулевой, горизонтальный уровень .
Рекомендуется использовать хороший по качеству, быстродействующий сервопривод, а также батарею приемника большой емкости.