Типы моделей подводных лодок - статические и динамические:
Есть два основных типа моделей подводных лодок, модели которые погружаются динамически (динамические ) и модели которые погружаются статически (статические).
Первый тип - динамическая модель, является самым простым. Он состоит в том, что судно погружают на скорости рулями глубины. Это выглядит немного как "погружение" - пока мотор работает, и органы управления расположены в положении погружения, модель находиться под водой, но как только модель замедляется или останавливается, выскакивает из-под воды почти как пластиковая бутылка. Эти модели характеризуются более крупными и более мощными двигателями и некоторой большей площадью элементов управления.

Второй тип модели со статической системой погружения . Название указывает на способность модели оставаться под водой при полной остановке - когда приводные двигатели выключаются. Такие модели имеют активную систему балласта, которая позволяет им погрузиться в манере, более похожим на оригинал. Они гораздо сложнее, чем динамичесого погружения. Они должны быть гораздо более жёсткими т.е. выдерживать давление, как на поверхности, так и под водой. Статические системы бывают нескольких типов, я буду обсуждать сейчас наиболее популярные.
-система, основанная на водяных насосах
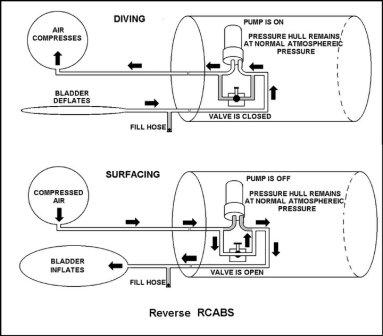
-система, основанная на компрессорах
-система, основанная на газе (cжиженного или сжатого)
-поршневая система
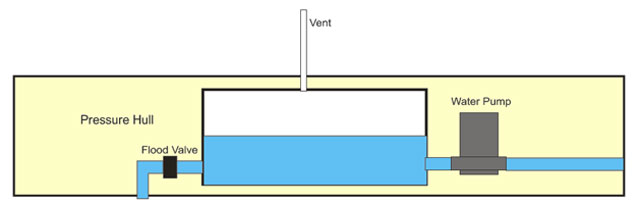
Система на основе водяного насоса:
Один из самых простых балластных систем, которые могут быть установлены в модели. Ее большим преимуществом является простота и легкость сбора необходимых деталей. Для того, чтобы погрузить модель необходимо открыть запорный клапан и включить водяной насос, который качает воду в бак. Воздух выходит из резервуара очень тонким (не более 2 мм в диаметре), часто воздушная трубка распологается высоко над рубкой. Когда резервуар заполнен, закройте клапан и выключите насос. Модель должна теперь иметь минимальную положительную плавучесть и располагаться в верхних слоях воды под поверхностью. Для того, чтобы модель всплыла на поверхность, мы должны плыть к поверхности так, чтобы вентиляционное отверстие было над поверхностью воды, а затем открыть клапан и включить насос на откачку воды. Недостатком этой системы является необходимость плавать на поверхности, чтобы выйти полностью, и неспособность погружения на дно . В случае потери сигнала, также может случиться ситуация, что модель не вернется на поверхность. Система монтируется в простых и небольших (водоизмещением 3 кг) моделей.
Может быть использован любой типа насоса - двунаправленный шестеренчатый и перистальтический (тогда вам не нужно устанавливать клапан, насос выключен в качестве непроницаемого для воды). Вы можете также использовать однонаправленный насос, например, ротор, а затем использовать его только для опорожнения резервуара, так как большинство насосов однонаправленных водопроницаемое, когда он выключен - затопление резервуара происходит автоматически при открытии клапана, но немного медленнее. На пути входа воды хорошо бы закрепить фильтр (например, топливный фильтр моделей внутреннего сгорания), который предотвратит повреждение насоса.