Тема: БК моторы, обзор и выбор
Принцип работы трёхфазного вентильного двигателя
Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора. Вентильные двигатели (в англоязычной литературе BLDC или PMSM) ещё называют бесколлекторными двигателями постоянного тока, потому что коллектор такого двигателя обычно питается от постоянного напряжения.
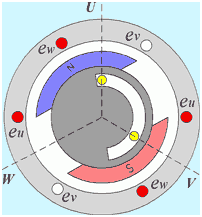
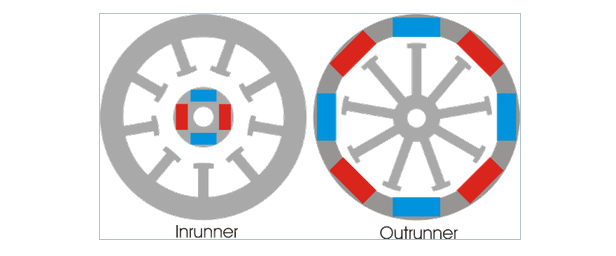
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока. Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессор обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания - достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.